Robotic Racer Shelley Performs on the Track Researchers at Stanford University have put a robotic Audi TTS on the track at…
Telepresence Robots Reviewed – Part 1 Not long ago, when referring to a telepresence system the meaning of such phrase…
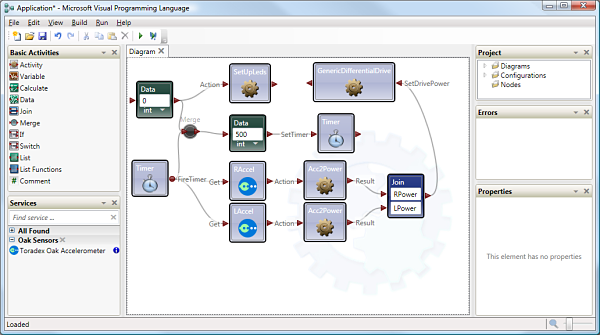
All About Microsoft Robotics Developer Studio Components Microsoft’s Robotics Development Studio gives us the opportunity to design and simulate robots in…
Ten Best Light Sensors Used in Robotics Light sensors are very common in robotics especially for navigation and object detection by…
How Advanced Autonomous Robotic Lawn Mower Works and Steps for Improvements The robots fight to take over most of the tasks and we must recognize…
Curiosity – NASA’s Mars Science Laboratory Mission Robot NASA’s latest martian robot, the Curiosity rover, part of the Mars Science Laboratory mission…