Design Concepts and Control of Automatic Systems Since ancient times man has imagined automated mechanisms or intelligent devices to take over…
Self Driving Cars are Just Robots with Four Wheels Looking for a new address where you want to travel on a huge touchscreen…
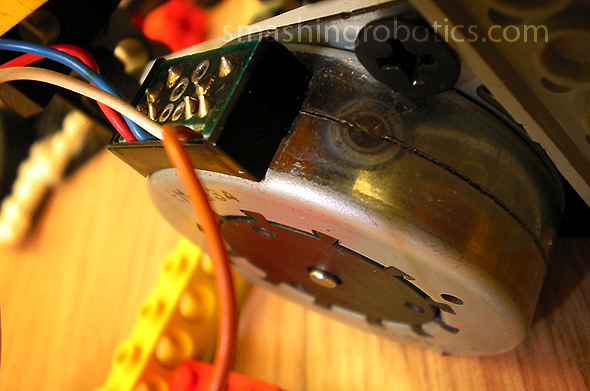
Walkthrough on Controlling a Stepper Motor In our article about stepper motors we have presented this type of electric motors,…
Motor Drive Shields – Arduino Compatible Robot parts movement is produced by actuators which are usually electric motors. These electric…
Telepresence Robots Reviewed – Part 2 We now continue our telepresence robot review, presenting to you more interesting robots and…
Concurrent Programming and Intelligent Robots A complex robot is backed up by busy intersections with commands and information that…
Infrared Sensors List Used in Robotic Projects Robots can employ many types of sensors with very different operating principles and features…