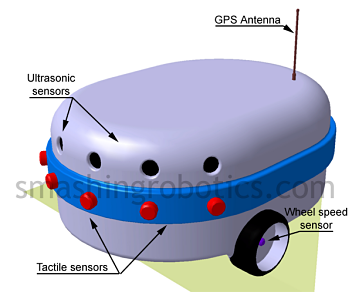
Introduction to Mobile Robot Sensor Systems Sensors are essential parts of autonomous mobile robots, without such devices it could not…
How Amarino Works – Controlling a Robot with an Android Smartphone Methods to control a robot increased in number along with the development of mobile…
Complete List of Agricultural Robots Robots used in agriculture are no longer a novelty, they are a necessity. Using…
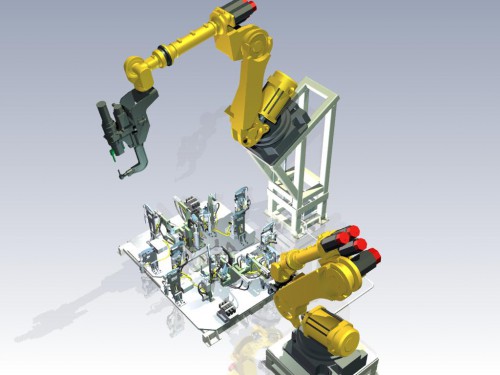
Most Advanced Robotics Simulation Software Overview Creating a complete virtual model of a robot or system by simulating components and…