Balance has an essential role in movement and performing tasks of a robot. If it’s relatively “easy” to develop a robot with two legs for walking vertically like a human, it becomes a nightmare to develop for same robot abilities like carry weight, climb or descend stairs, run, or to maintain balance in case of external shocks. The impossible becomes possible.
The most advanced humanoid robot that can keep its balance in almost any situation comes from Japan from Junichi Urata and his colleagues at the University of Tokyo’s JSK Lab, led by professor Masayuki Inaba.
When a robot has four or more legs is said it has static stability. This type of stability involves distributing the center of gravity between four or more legs, usually the total number of legs minus one, which is in the air to make the next step. In this case the balance is natural, resembling the type found at insects. This type of balance cannot be found at humanoid robots as they will always have only two legs.

How do humans keep their balance?
Let’s look at how the human system works overall to maintain balance. Human system keeps balance by combining information from the eye, ears and the body’s sense of where it is in space. The ears play a very important role in maintaining the balance, besides hearing these have a very fine mechanism used in balancing of the human body. The three parts that create the ear – the outer, middle and inner ear – have separate functionalities. The outer ear is designed to capture sound waves and direct them to the ear drum. The inner ear plays a double role: it allows us to hear sounds and detects the position and movement of the head, the information being used to maintain the balance.
How does a robot keep its balance?
The combination of sensors and actuators leads to a complex system of robot balancing. There are many sensors that can be used to this purpose, including accelerometers, gyroscopes and tilt switches. Each of these sensors have advantages and disadvantages which make them adequate or not to be used in a project. For example an accelerometer or a gyroscope have high accuracy in measurements but require complex software to interpret the output signal. A tilt sensor is cheaper but doesn’t have such accuracy and has a low frequency response.
The control consists of three primary activities: creating a vertical movement to support the body, change torque for moving legs and control of each step so as to respect the principle of symmetry during the balance. Another important factor in maintaining the balance is sensory feedback.
Types of robot balancing
There are two types of balancing methods in robotics:
- Support shift is a balance system that implies moving laterally the support base of the robot to achieve the balance. In other words this system is based onto the inverted pendulum principle. The advantage of this system is the low power consumption necessary to generate balance.
- Torque balance involves applying torque on component parts to return to the position proposed. This type of balance requires increased energy consumption and is necessary in situations where the path or support base is constrained. For example if the robot is on only one leg when it is subjected to external force, or if the robot suddenly changes its direction of travel.
How the most advanced balance control system works
The most advanced robot balancing system that has been developed by the team of researchers at JSK Lab can be used to develop fast and powerful robots which can be used around the house, for military purposes or in factories to solve the logistics problem. To develop this system, researchers used an electric actuation system that uses high-voltage and high-current liquid-cooled motor drivers. Instead of electric motors they could have used hydraulic systems, however in this case they would have to solve at least two major problems: powerful pumps for pumping oil and developing a complex control procedure just for driving the hydraulic actuator.
The electric motor instead is hooked up to a 13.5 Farad capacitor. This device can provide a large amount of energy in a very short time, the fast response of the system being vital to maintain balance. A conventional battery ensures fast and reliable energy transfer.
Advantages of liquid-cooled motor drivers
The first advantage is that hydraulic system to generate torque is not required, simplifying the design and the control methods. A Maxon electric motor was employed, modified to be liquid cooled. The power rating of the electric motor is 200 Watt and it can achieve in an extremely short time a speed of over 1000 degrees/second at a torque of 350 Nm.
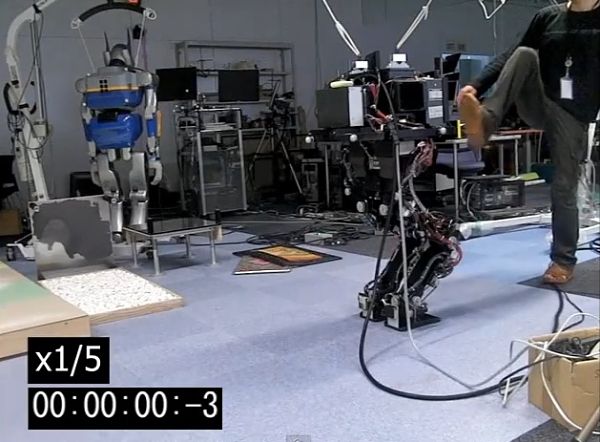
In this case the robot may be subject to external brutal forces without having a major impact on its balance. The subject of study from this article weighs 53 Kg and can be hit, direct strikes to the knees and various other types of impacts can be coped with. The result is shown in the video below:
Compared with air-cooled electric motors, liquid-cooled motors have higher power handling abilities for units of similar dimensions, are lightweight and high speed. The use of such motors can significantly increase the performance of any robot.
Benefits of employing a capacitor
Using a 13.5 Farad capacitor was not random in this case as this device greatly improved the response time of the system, releasing a great amount of energy quickly enough for the electric motor to perform properly in balancing the robot.
Conclusion
For humans, balancing the body is so routine that we are almost not aware of it. For a robot with two legs this is one of the most difficult tasks, a task that consumes considerable energy resources and computing power. Creating a balance system similar to human balance is a great advantage in robotics and it is no longer a secret that robots become increasingly smart and are getting ready for school.
Resources- Equilibrioception, Wikipedia
- Robot legs, Channel4’s Robots
- “Robotic Balance Through Autonomous Oscillator Control and the Dynamic Inclinometer” by Nathan J. Nipper at the University of Florida
- Humanoid robot keeping its balance, Automaton