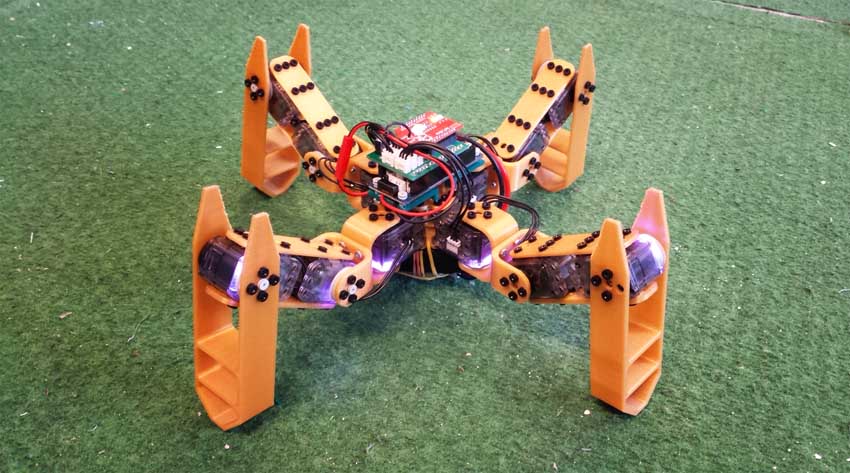
Enter Spidey, a completely open-source DIY legged robot platform, featuring 3D printable body parts, as well as commercially available electronic modules and servo motors. The robot platform is fully scalable in size, form and functionality. The parametric design allows you to customize the number of legs of the robot, the actual shape of parts, the firmware to determine behavior in the environment, you can add sensors and much more.

The Spidey open-source platform was created by Robot Campus, a French research association which aims at promoting robotics research and development. This association was created as part of the Rhoban project, the brainchild of researchers at LaBRI — Bordeaux Informatics Research Laboratory, a partnership between University of Bordeaux, French National Scientific Research Center (CNRS) and Bordeaux Polytechnic Institute (IPB).
The Spidey robot platform employs hardware from well-known company Robotis, which powers a large variety of robotic projects, including Jimmy Research Humanoid robot. Spidey employs the Dynamixel XL-320 servos and is controlled by the fully open-source OpenCM9.04 type B microcontroller, based on a 32bit ARM Cortex M3 chip. Each robot leg has 3 degrees of freedom (DOF), therefore if you plan to build the 4-legged standard variant, a total of 12 Dynamixels will be required.
Parts used for building the body of the legged robot are developed with the free OpenSCAD 3D modelling tool and are fully 3D printable. Other parts required are Ollo rivets, also employed with the well-known Robotis platform, as well as various pulleys, screws and nuts. As power source, the Turnigy 2-cell LiPo 1300 mAh, 7.4 V power pack is recommended to be used.
Assuming you have already got a 3D printer, building a complete Spidey robot with 4 legs should cost around 330 Euro, or about US$ 450.
Communication modules can be added optionally, for instance Xbee of WiFi radios can be implemented with the use of a custom built OpenCM++ interface, which also adds supplementary servo connections.
Code for the robot’s firmware is written in C++ and Python and features a well-structured design for easy understanding and future development. Parts inventory, electronics, firmware code, documentation and everything else required is available on GitHub.
Below you can watch Spidey robot presentation wideos, as well as access additional resources.
Resources
- Spidey repository – GitHub
- Spidey presentation page – Robot Campus
- OpenSCAD software
- Rhoban
- LaBRI