A robot can be defined as a means of automating operations normally performed by a human operator through direct interaction and coordination. It has a complex mechanical structure, with more degrees of freedom, and is controlled by flexible programming, while a manipulator is much more simplified in structure and is controlled by means a relatively rigid program, not so easy do modify.
General robot classification
There are two main types of robots based on the degree of mobility:
- Fixed – robots do not move with respect to certain components of their environment;
- Mobile – robots can travel in their environment by using various means of locomotion.
Intelligence is the ability of a natural or artificial system to adapt to the environment. In the following table we have a synthetic representation of robotic systems from the artificial intelligence viewpoint.
Table 1 – Robot classification based on AI
| Capability | Not similar to a human | Similar to a human | |
|---|---|---|---|
| 1 | Can repeat learned programs | Automaton | Automan |
| 2 | Is also mobile | Mechanoid | Mandroin |
| 3 | Has sensors and a computer implemented | Android | Humanoid |
| 4 | Is adaptive and heuristic | Cyborg (cybernetic organism) | Syman (synthetic man) |
| 5 | Has superhuman physical and mental abilities | Hyborg | Supersyman |
Robotic systems can be divided into:
- Robots;
- Manipulators;
- Teleoperation facilities;
- Prosthetics;
- Medical manipulators;
- Automated guided vehicles (AGV);
- Walking and crawling machinery.
Industrial robots
Industrial robots are part of industrial automation processes. Evolution from simple to complex of industrial automation is represented below, starting from level 1, which represents the human operator and reaching to level 10, which represents the self-improving machine.
Table 2 – Robot classification based on degree of automation
| Information source | Energy used for actuation | Level – Description of the machine | What robot |
|---|---|---|---|
| External environment | Electric Hydraulic | 10 – Self-improving machine | Neural network controlled robot |
| Variable program | Pneumatic | 8 – Machine that corelates its program with external conditions | |
| Programmable | Pneumatic | 7 – Numerical control machine 6 – Single operation machine | Programmable robot on-line or off-line |
| Fixed program | Pneumatic | 5 – Multiple operation machine 4 – Single operation automated machine | |
| Human | Human | 3 – Automated machine and hand tool 2 – Hand tool 1 – Hand |
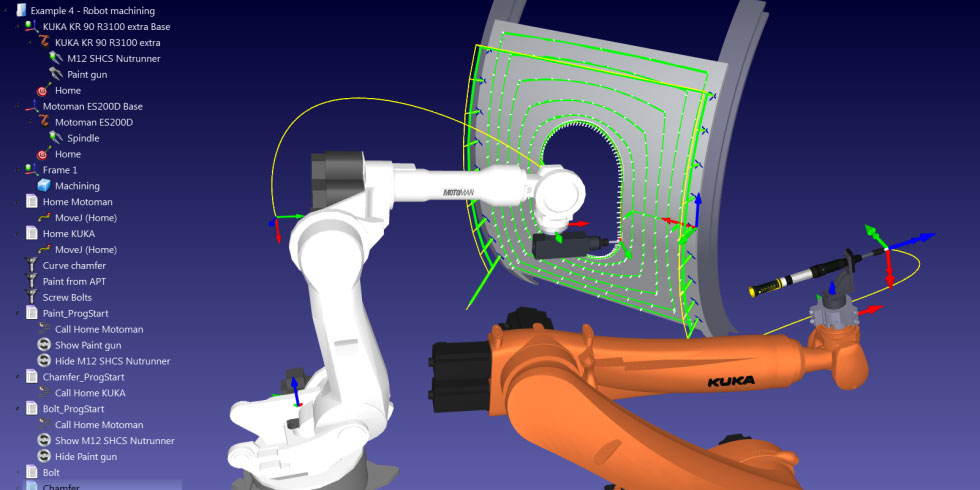
The robot is a high-level automated system, its main role being to manipulate parts and tools, replacing human activity. A few examples of applications at which utilizing industrial robots presents clear advantages are spot welding, contour welding or brazing, assembly and painting, quality control and manipulation of toxic and radioactive materials.
The industrial robot is defined to date as a three dimensional, multifunctional and reprogrammable system, capable of manipulating materials, parts, tools or special equipment according to predefined trajectories with the purpose of accomplishing various fabrication operations.
Industrial robots can be classified into three main categories, with respect to the type of interaction with a human:
- Automatic robots;
- Bio-technical robots;
- Interactive robots.
Automatic robots accomplish their tasks without direct intervention of a human in the control process. Based on the degree of adaptability of these robots to the environment, we can identify three generations of automatic robots.
First generation robots are characterized by fixed control programs, they are capable to only repeat in a strict fashion operations previously programmed into them, they cannot adapt to the environment so no external perturbations must exist. The program can be changed to some extent, but these robots are best suited in industrial environments performing repetitive operations.
Second generation robots are adaptive, they can operate in variable or partially unknown environments. The ability to adapt under the effect of external perturbations is enabled by using sensors that measure various parameters of the environment. These robots execute a series of predefined operations but can also take into account changes in the environment and alter their routine in order to accomplish their tasks.
Third generations robots are intelligent, they have certain artificial intelligence abilities, their degree of intelligence varies according to needs identified in the design phase. These robots are capable of defining their instantaneous actions taking into account information gathered by tactile, visual or noise sensors, resolve particular issues and modify their routine accordingly.
Standards in Robotics
The concept of a robot is defined differently by certain standards or institutions.
French norms – Normalisation Francaise (NF)
Norm E61-005 defines the manipulator as “a mechanical structure constituted by a series of articulated or sliding elements, with respect to each other, utilized to catch, move, position and guide objects (parts, tools, etc.) generally following a number of degrees of freedom. It can be controlled by an operator, an electric programmable automaton or by any means of logic system (cam device, wired logic, programmed logic, etc.), independently or associated.”
Norm NF61-100 defines a robot as “A mechanism of automated manipulation, subdued in position, reprogrammable, polyvalent, capable of positioning and guide materials, tools or specialized devices, during variable and programmed movement, designed to execute various tasks.”
German standard DIN 2801 defines industrial robots as “Mobile automatons with universal applications, with multiple axes, whose movements are freely programmed onto trajectories or angles in a certain order of motions and, in certain cases, controlled by sensors. They are equipped with gripping devices, tools or other means of fabrications and can fulfill manipulation and fabrication activities. The industrial robot can be mounted in a stationary fashion, in a certain place or it can be moved by an aggregate.”
Japanese standards define the robot as “a mechanical system, fitted with flexible motor functions, analogous to the ones of the living organisms or imitations of them, with intelligent functions, systems that act according to a human’s will.”
Russian standards define the industrial robot as “an automated machine, stationary or movable, consisting of an execution device, having multiple degrees of freedom, and a reprogrammable device to control based on a program for performing motor and control functions in the production process.”
The Robotics Institute of America (RIA) defines the robot as “a reprogrammable, multifunctional manipulator, designed to move materials, parts, tools or devices, by means of variable programmed movements, with the purpose of accomplishing different tasks. The robot is an automatically operating equipment, adaptable to complex conditions of the environment in which it operates, by means of reprogramming, managing to prolong, amplify and replace one or more human functions in its interactions with the environment.”
The British Automation and Robot Association (BARA) defines the robot as “a reprogrammable device, designed to manipulate parts, tools and other production means, through variable programmed motions, to accomplish specific fabrication tasks.”
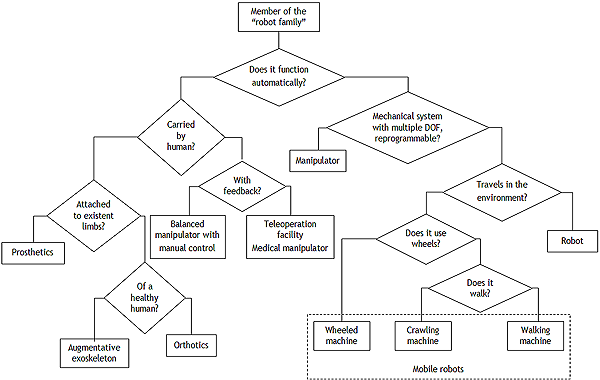
Another synthetic representation of the robotic family can be found below.
Robot classification graph
ISO industrial robot classification
According to the main actuating power source:
- Pneumatic;
- Hydraulic;
- Electric.
According to the type of motion control:
- Point-to-point or without speed control – continuous or discontinuous;
- Continuous trajectory control.
According to programming models:
- Through direct learning;
- Trajectory generation;
- Off-line.
According to types of sensors employed:
- Position detecting units;
- Simple linear logic;
- Sensors for signal proportional to the deviation.
French Industrial Robotics Association (AFRI) proposes the following classification for industrial robots:
Manipulator control type:
- Control or telemanipulation;
- Automatons with preset cycles – pneumatic, electric or electronic.
Robots can be:
- Programmable, controlled in position loop, with continous trajectory or point-to-point movement;
- Intelligent, with sensors that exclude simple binary logic and accomplic various tasks with the aid of shape recognition systems.
Resources
- Robotics history, Robotics Research Group at University of Texas