
Unmanned aerial vehicles, UAVs or drones are essentially mobile robots that can fly. They are used primarily in research, tracking and surveillance applications and are especially useful if the area to be monitored presents great risks for a manned mission. These aircraft were available, not very long time ago, only to professional and military fields, however thanks to developments in actuator technology, materials and, of course, processing power, such robots have become more affordable and are nowadays available to the general public. Apart from the practical abilities, the entertainment potential for these robots continues to be discovered as the market for these products continues to expand.

The commercially available systems come in various shapes and sizes, either in fixed wing constructions, similar in to planes, or with rotors, similar to helicopters, the latter being preferred as such drones can be also operated indoors or in narrow environments, multi-rotor type airframes being the most common in low altitude, short to medium range applications. These robots that can be remote controlled, either by dedicated consoles or even by your personal mobile device or can be fully autonomous in accomplishing their missions. In this article we review several UAV kits and platforms that we find interesting, cost-effective and, why not, entertaining.
ArduCopter platform
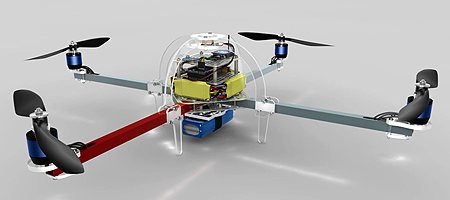
ArduCopter is an Arduino based platform for multi-rotor aircraft and helicopter type constructions. It is an open-source project, now at version 2.6b. Remote control features or fully autonomous flight are possible and, thanks to its software, even telemetry data can be sent remotely to a ground station. Supports Windows, Mac and Linux operating systems.
The core of the system is the ArduPilot Mega 2.0 autopilot module, created by the DIY Drones community, that integrates an IMU – the MPU-6000 6 axis accelerometer and gyro chip from InvenSense, a GPS module, barometric sensor, digital compass, and the CPU and USB functions modules from Atmel. It is not a dedicated module as it can be implemented into any type of mobile platform, from flying to terrestrial or marine, effectively turning it into a fully autonomous mobile robot.

The Mission Planner software is created by Michael Oborne and provides features like creating waypoint entries using Google Maps, select predefined mission commands from menus, you can view mission log files, configure the APM module, set up your type of aircraft and you can even interface with a flight simulating software to create hardware-in-the-loop (HIL) simulators. The software runs natively on Windows, but can also be installed on Mac as running under the Parallels VM.
The ArduCopter can be bought either as a complete, ready-to-fly kit, at prices of around 850 to 1000 US dollars, depending on number of rotors, four or six, or you can build your custom system by buying parts separately. The APM 2.0 module alone costs around 200 US dollars, a 4-rotor airframe with motors costs around 300 US dollars and sensors like sonars, magnetometers, optical flow sensors and other accesorries are available at prices of tenths of US dollars.
Parallax ELEV-8 Quadricopter kit
Another affordable kit example is the Elev-8 Quadcopter from Parallax. It is available at around 600 US dollars and, as its name states, it is powered by four rotors with fixed pitch blades. The CPU of the system is the Parallax Propeller multicore microcontroller and employs a HoverFly Open board to handle stabilization of the airframe only, as this is a remote controlled platform.

Like all Parallax products this is an open-source platform, resources and support being readily available. The kit comes with all required hardware and software components to build the platform, auxiliary equipment requirements are a 6 channel RC system and a battery.
It has four 25 cm rotors – 2 propellers and 2 pushers – directly driven by 4 electric motors, controlled by 4 Turnigy Plush electronic speed controllers (ESC). The airframe is made of aluminium.
The robot has a size of about 47×47 cm, 18 cm tall, adequate dimensions for outdoor use. It has a weight of approximately 1 kg and an additional 1 kg payload can be carried by the aircraft.
Parrot AR Drone 2.0 Quadcopter
The AR Drone Quadcopter from Parrot can be regarded as a toy, but there is really more to it. The device can be remotely controlled from your mobile device running iOS 5.0+ or Android 2.2+ by means of its Free Flight 2.0 application, available on Apple’s App Store and Google Play, which is also compatible with the AR Drone 1.0 device, as Free Flight 1.0 software offered support only for iOS devices.
Now at its second iteration, the aircraft features a more sturdy airframe and also features a foam bumper to protect it from severe impacts. Its modular design allows for swapping damaged parts and the battery pack has been redesigned for an increased flight time, up to 15 minutes. It has four rotors, powered by 14,5 W electric motors controlled by water resistant ESCs. The system is powered by a 1000 mAh LiPo rechargeable battery.

The drone is equipped with a 720p HD camera, shooting at 30 fps in H.264 format or capturing JPEG still images that is equipped with a 92 degrees wide angle lens. Data can be streamed and recorded directly by the remote device or stored on a SD card attached to the aircraft.
The CPU of the system is a 32 bit 1 GHz ARM Cortex A8 microcontroller running a Linux 2.6.32 OS, with an 800 MHz TMS320DMC64x video DSP module. It has 1 GB of DDR2 RAM running at 200 MHz, USB 2.0 and WiFi b/g/n interfaces, 3 axis accelerometer, gyro and magnetometer, an altitude determination system that employs an ultrasonic sensor for low altitudes and a barometric sensor for altitudes greater than 6 meters and a secondary QVGA camera running at 60 fps for ground speed measurements. It can be bought at a price of around 300 US dollars and support is available at the manufacturer’s website.
Skybotix CoaX Autonomous UAV helicopter
In a completely different price range, of around 5.000 US dollars, the CoaX autonomous helicopter from Skybotix, is a very powerful open-source platform designed for educational and research purposes. As its name implies it features autonomous flight capabilities, depending on hardware installed, and can be flown right out of the box by means of remote control. At 17 cm tall and 16,5 cm wide it is one of the smallest aircraft on the market. It has a mass o 280 to 340 grams, depending on equipment installed. The flight time of the drone can be of up to 20 minutes. It has a helicopter type coaxial twin rotor construction, making in very stable and easy to control. The airframe is made of 2D carbon water cut sheets, making it very lightweight and sturdy.
The core of the system is the CoaX board, integrating many sensors and control modules employed by the aircraft. In its basic version the aircraft is controlled by twin DSP PICs, one handling low level functions such as motor control or communication with auxiliary modules, the other one being a dedicated IMU module that handles data fusion algorithms. Integrated interfaces such as FTDI, WiFi g and USB are available and support for numerous additional interfaces is provided, such as WiFi n, Bluetooth or ZigBee that can be directly connected to the board.

Integrated sensors such as a 3-axis accelerometer, a Z-axis and X,Y-axis gyroscopes, 3-axis magnetometer, barometer, dedicated down-facing sonar connectors or an USB port for camera are available and support for a variety of sensors and actuators such as main motors, additional roll-pitch sevos, IR sensors and so forth is available directly from the board.
The optional Overo module, created by the Gumstix community, based on the OMAP35x processor is basically a micro-computer that can run ROS installations or other variants of Linux. The CoaX board supports up to two Overo modules, that can be plugged in directly into the dedicated 70-pin connectors. Support for additional interfaces, provided by the Overo modules, is available directly from the CoaX board such as the I2C bus, SPI bus, UART, analog inputs, PWM and 1 Wire interface lines.
Included with the kit a 2.4 GHz remote control is also available through which the operator can access all basic functions of the robot and a 1,3 Megapixel color camera shooting at 30 fps. There is also an optional research grade camera available.
Infinite Jib EYE-Droid 4 Quadcopter UAV camera platform
The EYE-Droid platform from InfiniteJib comes in 3 flavors, with 4, 6 or 8 rotors with prices between 9.000 to 14.000 US dollars. Key differences are in size, thus payload capacity and battery life. These drones are designed to carry photographic an imaging equipment, being sometimes called Aerial Photographic Equipment (APE).
The EYE-Droid 4 is the most compact of the range, with a height of 34,5 cm and a width of almost 70 cm, lifted by four rotors. It comes with a 14,8 Volts 5,45 Ah Li-Po battery to energize the system, leading to a flight time of around 13 minutes without payload and of 8 minutes with photographic equipment installed.

The drone is build on a AD4 Heavy Lift airframe from the well-known company Droidworx. The camera mount is provided by Photohigher and has 2 axis stabilization. The kit also comes with video goggles from Fat Shark, that incorporate a 5,8 GHz receiver to receive video data from the dedicated transmitter on the aircraft, for first person viewing (FPV) features, the goggles also providing a video output for displaying filmed images on a screen.
The avionics is provided by HoverFly, making this system expandable and customizable. The HoverFlyGPS hardware also provides features like position hold, return to home and waypoint definition features, creating the possibility for autonomous flight. Logging and telemetry data can be downlinked to either a ground station or to the 8 channel 2,4 GHz remote control that comes with the kit.
MarcusUAV Zephyr UAV system
The Zephyr UAV system represents a complete solution for high-altitude and long-distance surveillance or research missions, at a cost of around 9.500 US dollars. The kit provides all hardware and software elements to build your system.
The fixed wing aircraft employs a lightweight airframe propelled by a single electric motor. The control unit incorporates an IMU autopilot and a GPS module. It also has a retractable pan-tilt color camera system that will retract as the aircraft approaches the ground. The drone can be flown either manually by means of the RC controller that comes with the kit, complete with a telemetry data display, or autonomously with the aid of the Grond Control software package included. The kit even includes a Dell Inspiron laptop and a joystick for controlling the PT camera streaming live video to the ground station.

The aircraft can transmit live video up to almost 50 km, when equipped with the optional long range antenna, 15 km with standard antenna, while the high-power Li-Po batteries provide a flight time of up to one hour.
The Grond Control software provides a wide range of features such as autonomous waypoint navigation, tracking, logging and point-and-click autonomous landing control. You can even program an optional 12 Megapixel camera system to automatically take pictures at predefined waypoints, distance and time intervals, or simply click to take a photo whenever you want.
Resources
- HoverFly, Avionics systems
- Gumstix community
- Skybotix support portal
- Droidworx airframes
- EYE-Droid 4 product page, InfiniteJib
- AR Drone resources, University of Illinois
- AR Drone 2.0, Parrot product page
- DIY Drones community, store
- ArduCopter project
- ArduPilot Mega project
- ArduPilot Mega vehicles and accessories, UDrones
- Robot Shop
- Zephyr UAV, Product page
- PhotoHigher, Aerial photographic systems
- InteliSense, MEMS sensor manufacturer





Thank you for your appreciation.