Is there life without hands? Yes, certainly, but it would look very different if we didn’t have hands. A hand is the main tool used in manipulation of objects with various sizes and different weights. Each finger has its own role to make a functional hand, it can move independently, can feel and can adopt a position to accomplish different tasks. Human structure is the largest and the best source of inspiration for researchers and engineers in robotics, as they are trying to create an universal robotic hand to be used for most tasks, a hand that could not look or work differently than the human hand.
To build the perfect robotic hand researchers and engineers need to replace bones, tendons, muscles and nerves with metal, plastic and electricity. In addition to all these things, engineers should build a mechanism with the same dimensions, proportions and senses. If replication of the hand is almost complete, there is still a long way for researchers and engineers to solve the interaction between brain and hand for a robot.
In this article I made a list with best created anthropomorphic hands to date.
DART

DART (Dexterous Anthropomorphic Robotic Typing) is a project that took shape at Virginia Tech, a robotic hand that imitates almost entirely the performance, shape and form of a human hand. Perhaps it is hard to imagine a robot in front of a computer, but if the robot would have a DART hand it would certainly type on a computer keyboard like a human – 20 words per minute. A human can type with both hands an average of 3 words per minute, while one DART hand can type 20 wpm plus the use of keys like delete or backspace.
Hand muscles were replaced with 16 servo motors for fingers and another three motors for wrist motion. Tendons were replaced with wires and are located in the forearm.
Shadow C6M

C6M has in total 24 degrees of freedom which is allowing operation similar to a human hand. The force and sensitivity of the five mechanical fingers applied can be compared with the five human fingers. Actuation systems are using the Smart Motor concept, which includes in a single unit all that is needed to produce motion, force and sensitivity. In comparison with other models of robotic hands which borrow space from the arm to integrate various components, Shadow C6M incorporates all actuation and sensing required. These are: force and position control electronics, motor drive electronics, motors, gearboxes, force sensing and communications. For lightweight characteristics the hand structure is made of aluminum and plastic.
DLR Hand II

DLR Hand II is a robotic hand developed at the DLR Institute of Munich in Germany, a project started many years ago – more precisely in 1993. There is at least one major difference between this mechanical hand and its human counterpart, the number of fingers. DLR has four identical fingers, each of the four fingers have 4 joints and 3 degrees of freedom.
The large number of sensors integrated has led to creating a device which can feel and can move almost as good as a human hand. It is a flexible hand who can control the fingers to grab different objects, open a door or use a tool. Thanks to a friendly interface the mechanical hand can be used for various robots.
ELU-2

ELU-2 can be used in a wide range of applications starting with research and medical applications and has the sensitivity to feel a needle. The ELU2-Hand has 9 degrees of freedom that are servo actuated within the hand’s volume. The hand achieves many life-like actuations through linked movements such as cupping of the hand and combined knuckle flexion. Whilst originally designed to fit onto the ELU2-Arm, the compact ELU2-Hand design means it may be fitted onto many different robot arms.
RCH-1

RCH-1 is a robotic hand developed to be integrated into the WE-4R humanoid robot. Dimensions and characteristics are very similar with a human hand. The hand has 16 DOF divided as: 3 DOF for each finger and 1 DOF for thumb adduction. Fingers are actuated by means of cables by a motor integrated into the forearm. Muscles that act the three phalanxes were replaced with a cable that can produce motion, while the extension is obtained through torsion springs. The thumb is operated separately from the other four fingers, it is connected to a motor integrated into the palm.
ACT Hand

The Anatomically Correct Testbed (ACT) hand is the result of research that solves the relationship between mechanical and control components to perform tasks that require achieving robust, versatile and dexterous movements. Finger movements are done independently by independent “muscles”. A major difference between this mechanism and others is a non-constant relationship between the actuators and joints. All these features have led to a mechanical hand that can play musical instruments, can grab a pair of glasses, use chopsticks, gesture and perform daily tasks such as cooking and writing.
Next Generation of Robotic Hands

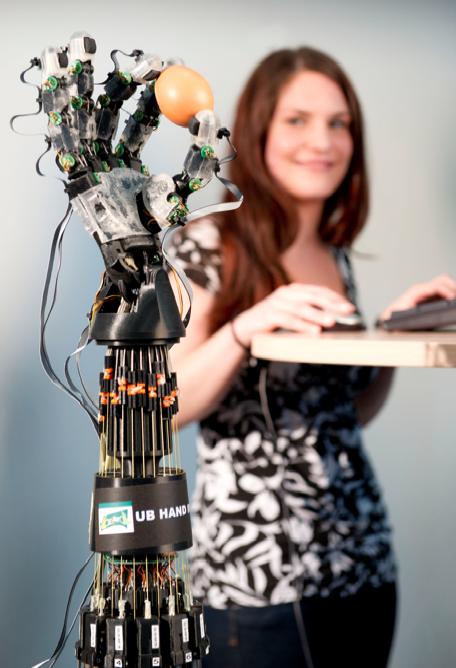
The report between simplicity of the mechanism and complexity of tasks can reach high values in most cases, but not this time. This robotic hand developed by researchers at Saarland University in Saarbruecken, Germany, is quite sensitive, it can hold an egg with three fingers. The mechanical structure of its fingers is similar to human fingers, tendons are replaced by stringy motors. The secret of a stronger hand that can perform delicate operations consists of a combination between small electric motors and twisted strings.
EH1 Hand

EH1 is a programmable platform which can be used in research or education, a mechanical hand which feels and grabs objects thanks to the multitude of sensors integrated into all five fingers. At the base of the hand all actuation units are installed on a flange and connected by wires the the five fingers. Each of the five actuators has its own processor, firmware, sensor acquisition electronics, communication electronics and servo-controllers. It has its own processing system and in this case it is enough to send one byte to command the hand to catch an object.
- “Robot Hand Mimics Human Hand, Types 20 Words-Per-Minute”, medGadget
- Shadow Dextrous C6M technical specification
- DLR Hand II, Institute of Robotics and Mechatronics at German Aerospace Center
- ELU-2 Hand official, Elumotion
- “From the Human Hand to a Humanoid Hand: Biologically-Inspired Approach for the Development of RoboCasa Hand #1” by M. Zecca et al., Robocasa project at Waseda University
- “Mechanisms of the Anatomically Correct Testbed (ACT) Hand” by A. D. Deshpande, Z. Tzu et al., Neurobotics Laboratory at University of Washington
- Robotic hand with fingertip senses grabs raw eggs, Saarland University
- Dexterous robotic hands, Prensilia