Robot senses are created using sensors with different properties. Force sensors are used also to sense, sense the pressure or force applied. Humans uses such type of sensors to feel what they touch. Use in robotics force sensors can be used to sense a cup, sense a piece, sense the maximum force applied to an egg, or sense when a robot is touched. A large number of such sensors over a unit of measurement results in increased accuracy when a robot touches an object or is achieved.
Reducing the size of the force sensor led to the creation of artificial skin which can be used in robotics to create intelligent robots that mimic humans as well.
A sensor that changes electrical resistance during the action of forces – is called force sensor. Used especially for robots to feel objects, force sensors can also be used for any robot which is part of industrial or service robots according to the specifications and the type of robot.
The size of force measured by the sensor depends from sensor to sensor. From measurement of a force appeared after applying a weight of few grams and up to sensors that can measure the force exerted to a mass of several hundred kilograms.
1. Button Load Cell (0-200kg)
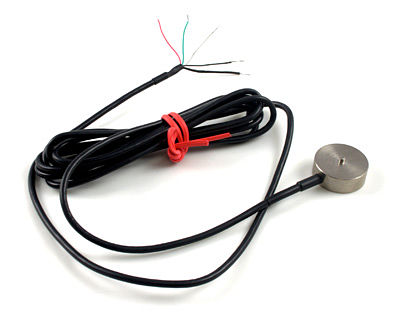
Used to measure a maximum weight of up to 200 Kg, Button Load Cell sensor is specially designed to measure a certain force while other forces being applied will be ignored. Analog output has very small values and is required the use of a special amplifier and measurement system of output signal.
With small sizes and rounded forms the sensor can be easily integrated into robots with limited space.
Specifications:
- Compensated temperature range: -10°C to +40°C;
- Operating temperature range: -20°C to +55°C;
- Safe overload: 120%F.S;
- Maximum overload: 150%F.S;
2. Interlink Electronics Square FSR
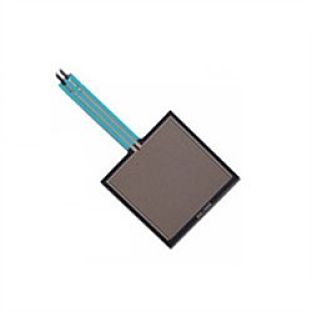
With a force sensitivity between 100g to 10kg, Electronics Square FSR force sensor produced by Interlink has a 12.7mm (1.5”) square pad to sense applied force. Created from polymer thick film which resistance increases when a pressure is applied, the sensor has small sizes and lasts up to 10 million actuations.
Used mainly for human touch control applications, the sensor has a thickness of only 0.46mm(0.018″).
Specifications:
- Active Area: 38.1mm(1.5″) x 38.1mm(1.5″);
- Nominal Thickness:0.46mm(0.018″);
- Force Sensitivity Range: 100g to 10kg;
- Pressure Sensitivity Range: 1.5psi to 150psi;
- Lifetime: 10 million actuations;
3. Phidgets Thin Force Sensor
With a thickness equal to a sheet of paper, flexible and round, the sensor produced by Phidget can measure a maximum force exerted by a mass of 2 kg.
To reduce measurement errors the sensor include a disc that is designed to apply pressure on a larger surface of the sensor. In this case the measurement error is between -10% and +10%.
When the force applied to sensor is null the sensor output has value 0. When the applied force of sensor is equal with 2 Kg of weight analog output has value 1.45mA.
Specifications:
- Current Consumption at Max load: 1.45mA;
- Current Consumption at No Load:0mA;
- Output Impedance: 3.3 kiloOhms;
- Input Voltage: 4.5 V to 5.25 V;
- Maximum Force: 2 kg;
- Min/Max Error:±10%;
4. Piezo Element
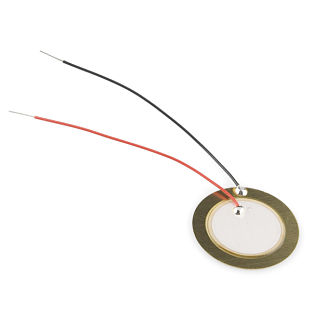
Simple, with small sizes, the sensor created by Sparkfun can be used to detect vibrations or shocks. It is a special sensor that uses the piezoelectric effect to measure the force and is compatible with Arduino platform.
The output of the sensor is analog type.
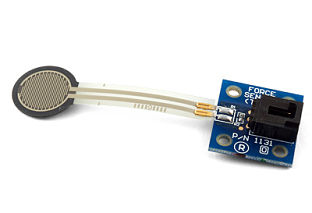
5. Parallax FlexiForce

FlexiForce is a sensor used to measure the force for a mass of maximum 11kg (25lbs). Thin, with a diameter of the surface for measurement force of 9.53mm(.375 inch), the sensor has a resolution of approximately 0.7 Kg (1.6lbs).
The analog output is set to 0 when is not register any force and a value of 4.2 V when is measured the maximum force accepted.
Optimum operating temperature is between -9 to +60 °C (+15 to +140 °F).
Specifications:
- Power requirements: 5 VDC;
- Communication: Sensing area 9.53mm(.375 in) diameter;
- Dimensions: 203 x 9.53 x .127 mm (8.00 x 0.55 x .005 in);
- Operating temp range: -9 to +60 °C(+15 to +140 °F);
6. Hexapod Foot Sensor

Created by Lynxmotion, Hexapod Foot Sensor includes two sensors, a hexapod foot caps, a rubber bumpers, and hubs. Does not include tubing, wires, heatshrink, or wire ties.
7. S Type Load Cell

Created by Phidgets the S Type Load Cell sensor is one of the most performing sensors to measure force with a maximum load capacity of 100Kg. It can be used to measure a specific force and ignore other forces which can be applied to sensor. Output signal has small values and is required to be used a specialized amplification.
With small sizes the sensor is easily integrated into any structure.
Specifications:
- Compensated temperature range: -10°C to +40°C;
- Operating temperature range: -20°C to +55°C;
- Safe overload: 120%F.S;
- Maximum overload: 150%F.S;
8. Micro Load Cell (0-5kg)
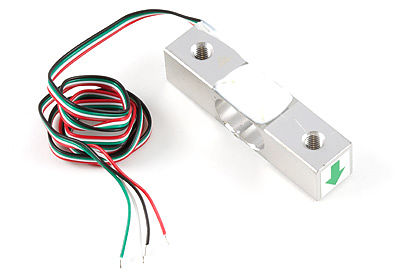
Created by Phidgets the Micro Load Cell sensor has a resistance metallic structure and can measure the force exerted by a maximum of 5 kg. Measuring surface force is specifically designed to measure a specific force directed in a certain direction. In this way the level of noise that can cause measurement errors is quite small. Output signal has a very small value and like others sensors is required to be used together with an amplifier.
Measuring very small values of the output signal the sensor comes with analog signal output amplifier.
Specifications
- Precision: 0.05%F.S;
- Capacity: 5kg;
- Non-Linearity: 0.05%F.S;
- Repeatability: 0.05%F.S;
- Creep: 0.05%F.S/30min;
- Temp. effect on zero: 0.1%F.S/10°C;
- Temp. effect on span: 0.05%F.S/10°C;
- Zero Balance: ±1.5%F.S;
- Compensated Temp. Range: -10°C~+40°C;
- Operating Temp. Range: -20°C~+55°C;
- Safe Overload: 120% Maximum Load Capacity;
- Maximum Overload: 150%Maximum Load Capacity;