Robots have been around long enough for a rich research environment to be created where Sci-Fi movies have become reality. The human body is one of the main instruments of inspiration for researchers, and the human senses have become a means to enrich the robotics technologies. The human skin has many roles, but only one of them is implemented into intelligent machines using materials such as silicon or carbon.
An intelligent robot is a robot that feel and interpret the environment. Without sensors this metal box could not have a well established role. A cup, an egg, or a pen have different forms and can withstand without damage different gripping strengths, thanks to their outer shells. For a robot is impossible to feel and manipulate these objects without a wide range of sensors including reading of force, pressure or temperature. In this article you can find a list of sensors, an artificial skin consists of a large number of flexible and thin sensors, that can be used to dress up a robot from head to foot.
01. Seoul National University Electronic Skin
Researchers at the Biomimetic Laboratory of Seoul National University have imitated the nature and built an artificial skin with a simple design and a high accuracy. The electronic skin is built from two layers of polyurethane acrylate with a low-cost production process. The inspiration comes from a system that can be found in an ear and can interpret the sounds to transmit signals to the brain, the cilia.
The artificial skin is very sensitive, it can detect human impulses. Sandwiched between the two layers of sensors there are polymer nanofibers polydimethylsiloxane (PDMS) with a diameter of 100 nanometers and 1,000 nanometers tall. This forest of nanofibers is designed to function as a potentiometer which detects in what part of the sensor the electrical resistance has different values. The values of electrical resistance vary with pressure applied onto the sensor’s surface.
Electronic sensor can detect with high accuracy, shear forces and torsion. This system is sustainable over time despite the fact that we speak in nanometers and two thin layers of polymers.
02. Electronic Smart Fingertips

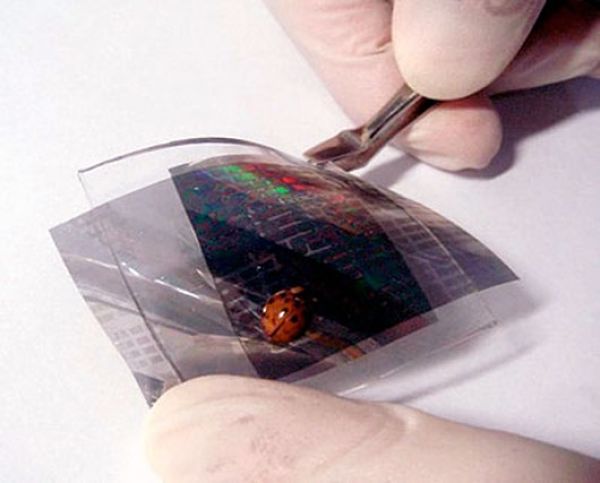
There are many artificial feedback systems used in robotics but most of them need improvements due to size or operating mode. The tactile sensor designed by John Rogers and colleagues at the University of Illinois, at Urbana-Champaign, is very thin and has high accuracy on sensing touch. Materials used to build this super tactile sensor include super-thin silicon sheets, gold conductive lines, and a flexible polymer material called polyimide. The artificial skin can be used in robotics for medical telepresence applications or for any other applications that require tactile sensing on remote locations. The electronic skin can feel the surface over which it passes, temperature or other characteristics.
The researchers performed tests using a prototype, they wanted to feel what a robot feels when it touches a smooth plain surface. The result was as expected, they received a slight tingling sensation in their flesh-based fingertips. These electrical signals, that are generated upon interactions with the tactile surface, can be read and interpreted by the control system of the robot. Using a well established range of signals different sensations can be created when a surface is reached or temperature must be sensed. Depending on the needs of detection, the electronic sensor can be improved with other types of sensors to sense the movement or vibrations.
03. Capacitive Skin
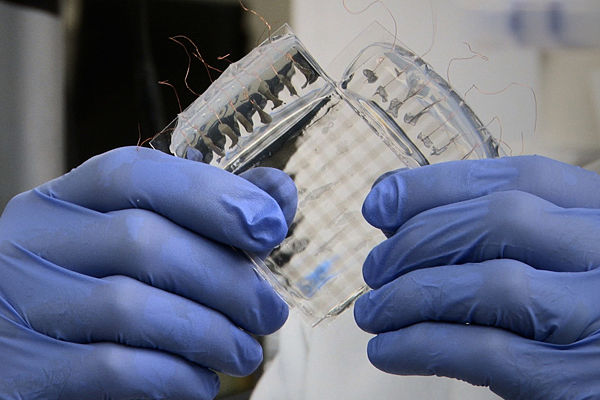
Human sensors are able to receive feedback both on flat surfaces and irregular surfaces. A team of researchers at Stanford University created a capacitive touch concept sensor which can easily be implemented in robotic applications. The sensor is transparent and very thin, making it a good candidate for medical applications or to simply implement the sense of touch for a robot. The sensor materials can be rolled or folded an indefinite number of times without distorting.
Creating an artificial skin is very delicate and is closely related to nanotechnology. On a silicon substrate carbon nanotubes are added by spraying, acting like springs when the silicon surface gets out of its original shape. This stretching of the nanotubes is measured and the force acting on them is determined. The carbon nanotube layer is sandwiched between two conductive layers at a distance which shrinks when a force is applied on a surface. The sensor can feel where a force is active and the amount of force applied.
04. Plastic Electronic Skin
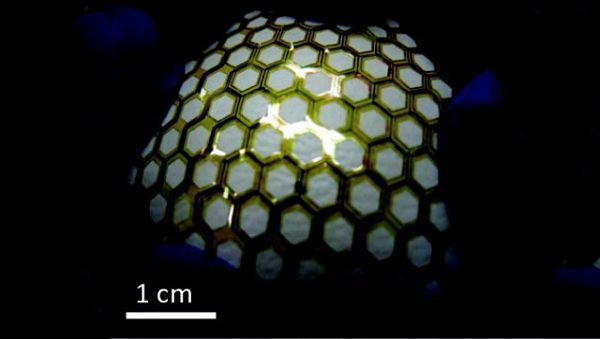
Using semiconductor-enriched carbon nanotubes a team from Berkeley Laboratories produced a very thin artificial skin, with reduced costs. The nanotechnology has helped to create the sensor with flexible transistors developed from carbon nanotubes. The sensor includes a layer of polyamide which is cut into hexagonal cells that makes place for a silicone layer above which the carbon nanotubes are found. The artificial skin can be used in many fields including mobile technology or computers, but for robotics it is a technology that can add value to robots.
05. Artificial Skin for Interaction

The researchers at the Robotics Laboratory of Laval University built an artificial skin especially designed for industrial robots that are working with humans. Human presence is required in industrial field working together with intelligent machines that are human friendly and safe. The ensure the safety of people the robot must identify activities in the environment.
The sensor is sensitive at pressure, scalable, resilient, deformable, and is inexpensive. By simply touching the artificial skin the robot knows that a human is nearby in its workspace, and even commands can be implemented to be activated by touch. This approach to industrial robots will reduce the number of accidents that can occur when people work together with robots.
Resources- Gizmag, “Seoul National University develops inexpensive, super sensitive electronic skin”
- Popsci, “Electronic ‘Smart Fingertips’ Could Give Robots and Doctors Virtual Touch”
- Wired, “Skin-Like Sensors Could Bring Tactile Sensations to Robots, Humans”
- Extremetech, “Berkeley creates flexible, rugged, plastic electronic skin with carbon nanotubes”
- Le Fil, “Les robots font peau neuve”